Lecture 3B: Error Cell Models
Error cells are a particularly useful component cell that offers a simple and fast way of computing mismatch signals, i.e., error values that compare a target value against a predicted value. In predictive coding literature, mismatch signals are often called “error neurons” and oftentimes are formulated as explicit cellular constructs that focus on computing the requisite difference values. In ngc-learn, error neuron component functionality has been in-built to readily allow construction of biophysical models that require mismatch signals, ranging from predictive coding circuitry to error-driven learning in spiking neural networks (see the ngc-museum for key examples of where error neurons come into play). In this lesson, we will briefly review one of the most commonly used ones – the Gaussian error cell.
Calculating Mismatch Values with the Gaussian Error Cell
The Gaussian error cell, much like most error neurons, is in fact a derived calculation when considering a cost function. Specifically, this error cell component inherits its name from the fact that it is producing output values akin to the first derivatives of a Gaussian log likelihood function. In neurobiological modeling, it is often useful to have the worked-out derivatives of the cost functions one might hypothesize that groups of neurons might be computing/optimizing, a setup that has yielded derivation of a wide plethora of learning rules in the biological credit assignment literature [1], most notably the prediction errors that drive the message passing scheme of mechanistic models of predictive coding [2].
In ngc-learn, error cell components are meant to produce not only the relevant partial derivative signals but also the local cost function value associated with them, since, again, error neurons are typically derived from some sort of objective. Furthermore, many of these kinds of neuronal cells can be treated as fast “fixed-point” computations, i.e., they do not have to adhere to dynamics dictated by ordinary differential equations[1], making them easy plug-in modules for the dynamical systems you might design.
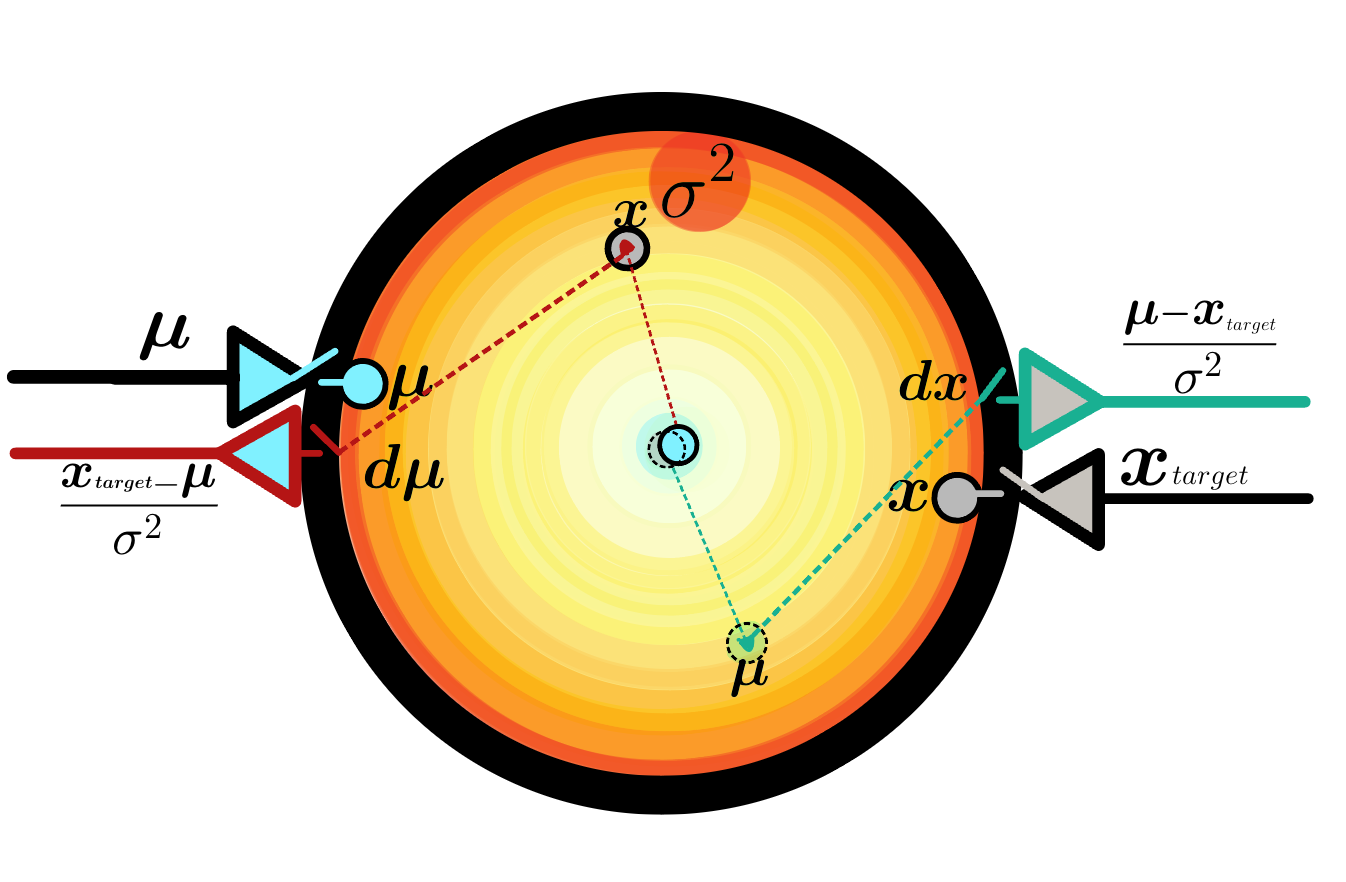
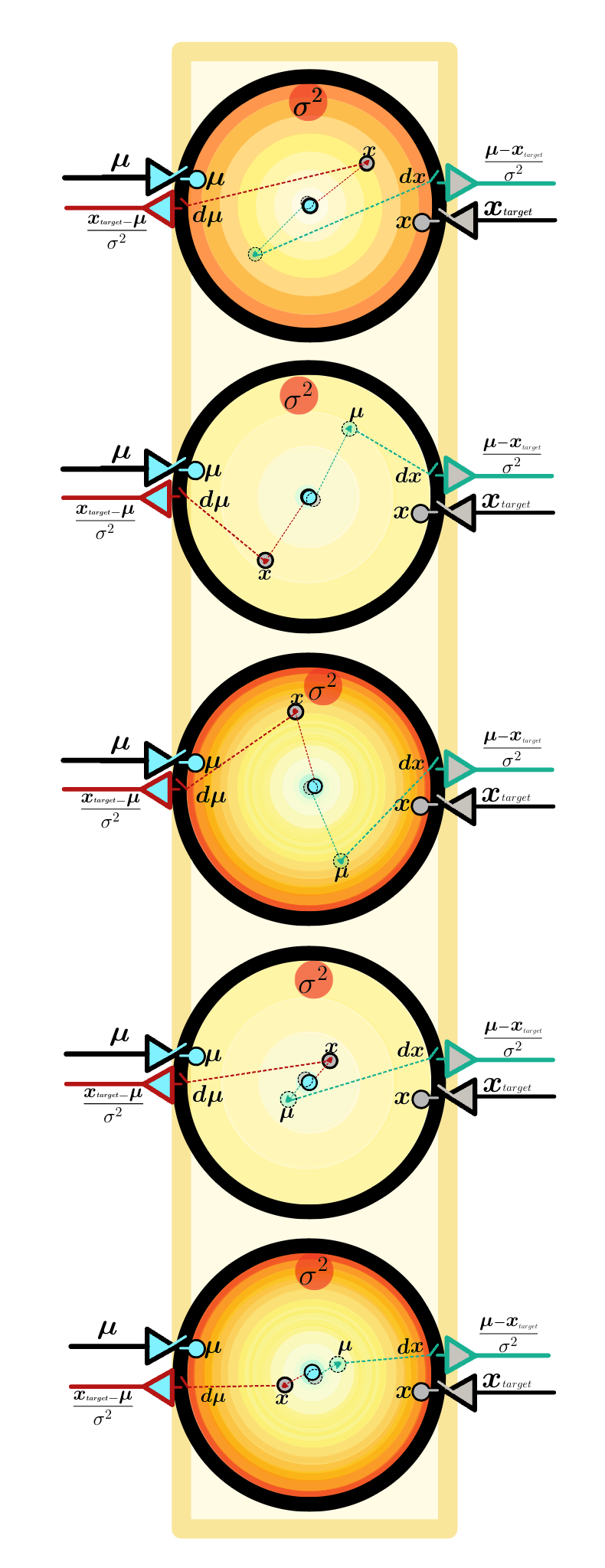
From a coding point-of-view, in-built error cell components can be imported and used in your models just like any other component; all that one needs to be aware of is the error cell compartment structure as these can produce different values that might be of interest depending on what the modeler wants to achieve. An in-built error cell component typically has at least five key components worth noting:
L– the local loss that this cell represents, essentiallyL = loss(target, mu);mu– the prediction signal that this cell receives;target– the target signal that this cell receives and compares to;dmu– the partial derivative signal ofLwith respect tomu;dtarget– the partial derivative signal ofLwith respect totarget.
Let’s go ahead and import the GaussianErrorCell and see what it does, assuming
we have a prediction vector guess produced from somewhere else (such as the output of
another component or another model) and a target vector answer we wish that prediction
could have been (which could also be the output of another component or another model).
The code you would write amounts to the below:
from jax import numpy as jnp, jit
from ngclearn import Context, MethodProcess
## import model-specific mechanisms
from ngclearn.components.neurons.graded.gaussianErrorCell import GaussianErrorCell
dt = 1. # ms # integration time constant
T = 5 ## number time steps to simulate
with Context("Model") as model:
cell = GaussianErrorCell("z0", n_units=3)
advance_process = (MethodProcess("advance_proc")
>> cell.advance_state)
reset_process = (MethodProcess("reset_proc")
>> cell.reset)
## set up non-compiled utility commands
def clamp(x, y):
## error cells have two key input compartments; a "mu" and a "target"
cell.mu.set(x)
cell.target.set(y)
guess = jnp.asarray([[-1., 1., 1.]], jnp.float32) ## the produced guess or prediction
answer = jnp.asarray([[1., -1., 1.]], jnp.float32) ## what we wish the guess had been
reset_process.run()
for ts in range(T):
clamp(guess, answer)
advance_process.run(t=ts * 1., dt=dt)
## extract compartment values of interest
dmu = cell.dmu.get()
dtarget = cell.dtarget.get()
loss = cell.L.get()
## print compartment values to I/O
print("{} | dmu: {} dtarget: {} loss: {} ".format(ts, dmu, dtarget, loss))
which should yield the following output:
0 | dmu: [[ 2. -2. 0.]] dtarget: [[-2. 2. -0.]] loss: -4.0
1 | dmu: [[ 2. -2. 0.]] dtarget: [[-2. 2. -0.]] loss: -4.0
2 | dmu: [[ 2. -2. 0.]] dtarget: [[-2. 2. -0.]] loss: -4.0
3 | dmu: [[ 2. -2. 0.]] dtarget: [[-2. 2. -0.]] loss: -4.0
4 | dmu: [[ 2. -2. 0.]] dtarget: [[-2. 2. -0.]] loss: -4.0
where we see that the loss makes sense if we consider that the Gaussian log
likelihood is being computed (under the assumption of a fixed scalar unit
variance/standard deviation – which means we recover squared error;
in other words, the cell effectively computes the loss:
L = -(1/2) sum_j [(answer_j - guess-j)^2] = -0.5 * ((1 - -1)^2 + (-1 - 1)^2 + 0) = -4
where j indexes a particular dimension of the vector answer or guess).
Note that since the prediction guess and target answer are fixed across
time, running the Gaussian error for five steps of simulation time yield
the same loss and partial derivatives. Finally, observe that dmu is the
partial derivative of the cell’s local cost function with respect to the
prediction/guess mu while dtarget is the partial derivative of the cell’s
cost with respect to the target/answer target.
Other error cells, representing other types of distributions/loss functionals are possible with the error cell framework; all that a designer of a new custom component needs to mathematically consider is if they can provide the scalar loss signal that takes in prediction and target vectors as well as values for the partial derivatives with respect to the predictions and targets (note that these derivative signals, in principle, do not even have to be exact derivatives so long as they represent a means of traversing the flow of the cost function, finding local minima or maxima.)
References
[1] Ororbia, Alexander G. “Brain-inspired machine intelligence: A survey
of neurobiologically-plausible credit assignment.”
arXiv preprint arXiv:2312.09257 (2023).
[2] Rao, Rajesh PN, and Dana H. Ballard. “Predictive coding in the visual
cortex: a functional interpretation of some extra-classical receptive-field
effects.” Nature neuroscience 2.1 (1999).
[3] Bogacz, Rafal. “A tutorial on the free-energy framework for modelling
perception and learning.” Journal of mathematical psychology 76 (2017).